Developed by STL Research, the Proteus Launch and Recovery System (LARS) is an innovative, stand-alone, deck mounted system, that enables the safe launch and recovery of autonomous or semi-autonomous marine equipment such as: ROVs, AUVs and ASVs, under local or remote control.
Ship-Based Robotic Arm For Autonomous Launch And Recovery (LAR) Operations.
The Proteus Launch and Recovery Systems with integrated machine vision, are innovative, stand-alone, deck mounted solutions, that enable the safe launch and recovery of autonomous or semi-autonomous marine equipment; such as ROVs, AUVs and ASVs, under local or remote control.
Motion-compensated personnel-access system (PAS) and light crane.
The Neptune 20M system enables transfer of personnel with equipment or cargo, from a vessel via a gondola, to a fixed or floating offshore structure with full (6DoF) motion-compensation to remove wave induced motions, with the payload arriving at the target structure with no relative movement between them.
Should you require any additional information, please contact us here
A variant of the classic ‘Stewart Table’ or ‘Hexapod’ and is similar to those found in flight simulators. It is commercially available for use for third party work.
About Us
STL Research is a consultancy, design, development and project implementation group, specialising in motion compensation, control and automation for the offshore and sub-sea industries.
Initially operating from Aberdeen and now based in Cowes, STL Research has been involved in many leading edge projects within the offshore and subsea markets. Two key focus areas are the safe launch and recovery of autonomous marine equipment under local or remote control (Proteus), and safe and efficient personnel access (Neptune).
Proteus is an innovative, stand-alone, deck mounted launch and recovery system, which uses computer vision to automatically synchronise movement of the interchangeable coupling tool with the target, to eliminate wave-induced motions, simplifying attachment and safe retrieval of ROVs, AUVs and ASVs.
The Neptune 20M Personnel Access System enables transfer of personnel with equipment, or cargo, from a vessel via a gondola, to a fixed or floating, offshore structure with full (6DoF) motion-compensation to remove wave-induced motion.
Legacy projects include diving systems, hyperbaric lifeboats, HP/HT valves, well head control & monitoring systems and automatic ultrasonic NDT.
Systems
Proteus 200 Launch & Recovery System (LARS)
ROV Recovery Operation Using Proteus 200
To see more videos including our Proteus 100 prototype and other STL projects, visit our videos page, or our YouTube channel by clicking HERE
You can find a PDF copy of this Proteus 200 datasheet on our Downloads page.
Proteus 200 Launch and Recovery System (LARS)
The Proteus 200 LARS is an innovative, stand-alone, deck-mounted system, that enables the safe launch and recovery of autonomous or semi-autonomous marine equipment; such as ROVs, AUVs, USVs; under local or remote control. As the host vessel and target (ROV, AUV etc.) are floating, they are both subject to wave-induced motions. The Proteus control system uses computer vision to automatically synchronise movement of the coupling tool with the target, to ease attachment and retrieval.
PRINCIPLE:
A stand-alone launch and recovery system that can be installed on any suitable vessel (including autonomous / unmanned surface vessels) and operates without requiring any vessel services or data, except for the optional use of ship-generated electrical power.
DESCRIPTION:
Building on the experience gained during extensive testing and development of the Proteus 100 prototype system, STL have designed the Proteus 200. The modified and optimised arm allows for a greater payload and improved range of motion, all while reducing the deck space required for installation. The system consists of an articulated three-section arm, mounted on a foundation with slew ring and gimbal (see Figure 1 below). The arm carries an interchangeable coupling tool on the last section, which latches onto a free-floating target for automated recovery or launch operations.The slew ring, gimbal and arm sections are moved hydraulically under computer control, actively compensating for relative motions between the target and host vessel.
Figure 1: Overview of the Proteus 200 LAR System
Launch:
Proteus may simply serve as a steerable hoist, latching onto the device on the vessel deck, lifting it clear and over the vessel’s side, then lowering it into the water and releasing it to depart on its mission.This process can be controlled by a local or remote operator. Alternatively launch may be carried out autonomously.
Recovery:
First, the target must manoeuvre into the field of view of Proteus’ tracking system. Proteus is then moved into its starting position, and the tracking system engaged. This will acquire the target’s position, aided by markers on its body.The coupling tool then automatically guides itself towards the target’s connection point, continuously tracking and compensating for the target’s relative movement in the water. Once the coupling tool is successfully aligned with the target’s connection point, capture is initiated and the coupling tool moves down to make a secure connection. When the coupling tool is attached, Proteus lifts the target clear of the water, swings it inboard and lowers it into its storage location on deck.
MOTION MEASUREMENT:
When synchronously stabilised (i.e. when the coupling tool matches the target’s motion), the camera-based visual tracking system measures the floating target’s relative position. The Proteus controller uses this data to derive the joint angles required to synchronise the coupling tool with the target. The controller also uses data from a deck-mounted attitude sensor to keep the arm assembly in the vertical plane.
OPERATING WINDOW:
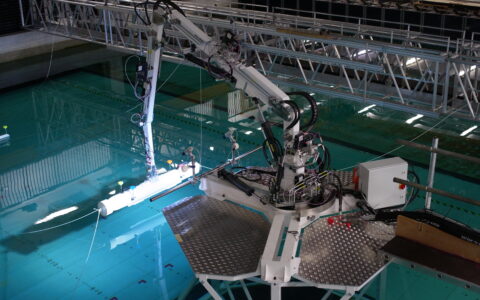
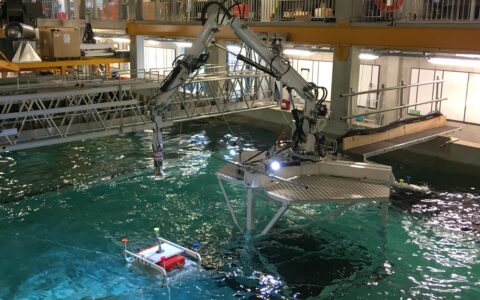
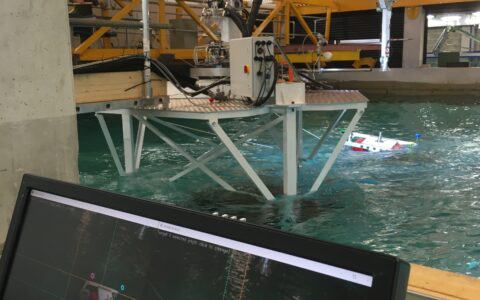
Sea trials (Figure 2) and wave tank testing (Figure 3) have proven Proteus 100 capable of operating at Significant Wave Heights up to 0.45mHs, even on smaller vessels, with improvements to these figures predicted for Proteus 200.
SPECIFICATION*:
Payload Weight
Up to 200kg
Lift Height Capability (from mounting surface)
-2.2m to +1.5m
Maximum Reach(from centre of foundation)
3.5m
Pitch/Roll Range
+/- 16 degrees
Slewing Range
360 degrees continuous
System Weight
675kg
System Foundation
0.77m diameter
Hydraulic Power Requirements
7.5kW @ 200 Bar
*Specification subject to change without prior notification
Figure 2: Sea Trials in Falmouth Bay
Figure 3: Plymouth University Wave Tank Testing
PRINCIPAL DIMENSIONS:
Figure 4: Principal Dimensions of the System in its Stowed Position
FEATURES:
Simplified LAR process reduces potential hazards to personnel and is less labour intensive
Light-weight design with small deck footprint, allows Proteus 200 to be installed on smaller, more economical vessels
Enhanced arm geometry gives an improved operating envelope
Compact, hydraulic slew unit with full 360 degree range of motion
Interchangeable, rotating coupling tool allows easy orientation of a wide variety of autonomous assets during retrieval and stowage
Motion compensated design increases system availability and reduces cost by extending the weather window
Designed for local operation on manned vessels, or fully remote controlled on autonomous surface vessels
SAFETY:
Design for safety is a key principle and is achieved in the following ways:
No dependence upon ship’s systems or data beyond vessel station-keeping
Less chance of damage to host vessel or target during launch and recovery procedures
Automatic latching of coupling tool to target reduces the possibility of the equipment being dropped
Optional second camera provides better target acquisition and redundancy should one camera’s view become obscured
OPERATING ENVELOPE:
Figure 5: Proteus 200 LARS Operating Envelope
STL’s Proteus 100 – prototype system undergoing wave tank trials at the University of Plymouth COAST Laboratory
You can find a PDF copy of this Proteus 500 datasheet on our Downloads page.
Proteus 500 Launch and Recovery System (LARS)
The Proteus 500 LARS is an innovative, stand-alone, deck mounted system, that enables the safe launch and recovery of autonomous or semi-autonomous marine equipment; such as ROV, AUV, ASV; under local or remote control.
As the host vessel and target (ROV, AUV etc.) are floating they are both subject to wave induced motions. The Proteus control system uses computer vision to automatically synchronise movement of the coupling tool with the target to ease attachment and recovery.
PRINCIPLE:
A stand-alone launch and recovery system that can be installed on any suitable vessel (including autonomous / unmanned surface vessels) and operates without requiring any vessel services or data, except for the optional use of ship-generated electrical power.
DESCRIPTION:
The system consists of an articulated three-section arm mounted on a base frame with slew ring and gimbal (see Figure 1 below). The system is hydraulically actuated and powered by either a vessel generated supply or an optional dedicated hydraulic power unit (HPU), which can be mounted on the base frame. The arm carries an interchangeable coupling tool on the last section, which can automatically latch onto a free-floating target for recovery. When launching targets into the water, the operator controls when the coupling tool releases the payload.
Figure 1: Overview of the Proteus 500 LAR System
During recovery operations the innovative control system ensures that the slew ring, gimbal and arm sections are moved to compensate for wave-induced motions between the target and host vessel.
To launch the target device, Proteus simply serves as a steerable hoist, latching onto the device on the vessel deck, lifting it clear and over the side of the vessel, then lowering it down into the water, where it is released to depart on its mission.
To recover a returning target, it must first manoeuvre into the field of view of Proteus’ tracking system. Proteus is then moved into its starting position, and the tracking system engaged. This will acquire the target’s position, aided by markers on its body, and guide the coupling tool down onto the target’s connection point (see Figure 2 below), automatically tracking and compensating for its relative movement in the water, so it can latch on smoothly and securely. As soon as it has latched, Proteus will lift the target clear of the water. It can then be swung inboard and lowered onto the deck.
MOTION MEASUREMENT:
When synchronously stabilised (i.e. coupling tool motion matched with that of the target to be recovered), a camera based visual tracking system measures the relative motion of the floating target. The Proteus controller uses this camera data to derive the joint angles needed to synchronise the coupling tool with the target. Data from a deck mounted attitude sensor is used by the controller to keep the arm assembly in the vertical plane.
SPECIFICATION*:
Maximum Payload Weight
500kg
Lift Height Capability
-2.0m to +2.5m
Maximum Reach
4.8m
Gimbal Range
+/-15 degrees
Slewing Range
270 degrees
System Foundation
4.0m x 2.5m
Proteus 500 Weight
1,000kg
Base Frame Weight
3,000kg
HPU (Optional) Weight
2,500kg
Hydraulic Power Requirements
50kW @ 95 Bar
*Specification subject to change without prior notification
Figure 2: Proteus 100 Sea Trials in Falmouth Bay
Figure 3: Proteus 100 Plymouth University Wave Tank Testing
PRINCIPAL DIMENSIONS:
Figure 4 shows theProteus 500 System in its stowed position, which is contained within the base frame’s deck footprint.
Figure 4: Principal Dimensions of a Typical Installation
FEATURES:
Simplified LAR process reduces potential hazards to personnel and is less labour intensive
Light weight design with small footprint allows Proteus to be installed on smaller, more economical vessels
Telescopic forearm design allows for a greater reach
Option to integrate hydraulic power unit (HPU) within base frame can reduce the install time and complexity
The use of a multi-jointed arm allows for operation in areas where height restrictions may present a problem
Motion compensated design increases system availability and reduces cost by extending the weather window
Interchangeable coupling tool making it suitable for use with a wide range of ROVs, AUVs, and ASVs
Designed for local operation on manned vessels or fully remote controlled on autonomous surface vessels
SAFETY:
Design for safety is a key principle and is achieved in the following ways:
No dependence upon ship’s systems or data beyond vessel station-keeping
Less chance of damage to host vessel or target during launch and recovery procedures
Automatic latching of coupling tool to target reduces the possibility of the equipment being dropped
Optional second camera provides better target acquisition and redundancy should one camera’s view become obscured
OPERATING ENVELOPE:
Figure 5: Proteus 500 LARS Operating Envelope
Typical launch and recovery operation using the Proteus 500 system
Proteus 500 LAR Storyboard 001 – Stowed
Proteus 500 LAR Storyboard 002 – Latched
Proteus 500 LAR Storyboard 003 – Ready
Proteus 500 LAR Storyboard 004 – Launch
Proteus 500 LAR Storyboard 005 – Deployed
Proteus 500 LAR Storyboard 006 – Return
Proteus 500 LAR Storyboard 007 – Acquiring
Proteus 500 LAR Storyboard 008 -Synchronise
Proteus 500 LAR Storyboard 009 – Capture
Proteus 500 LAR Storyboard 010 – Recovery
Proteus 500 LAR Storyboard 011 – Stowing
Proteus 500 LAR Storyboard 012 – Stowed Away
End Slide
Proteus Origins – Proteus Launch and Recovery System (LARS)
Part of the Autonomous Synchronised Stabilised Platform (ASSP) Project
With the rapid developments being made with Autonomous Surface Vessels (ASVs), they will play an ever increasing role in the servicing and repair of offshore installations for wind energy generation and hydrocarbon production. This is due to ASVs being able to operate around the clock in all but the most extreme weather conditions and, being unmanned, savings can be made by eliminating accommodation and equipment related to human safety. However, in order to carry out useful intervention tasks, ASVs need autonomous tools and manipulators.
With financial support from the Marine Challenge Fund (part of the ERDF’s European and Structural Funds Growth Programme 2014 – 2020, set up to boost marine innovation in Cornwall); STL Research have developed a multi-axis robotic arm for ship-based deployment.
The arm, known as Proteus, enables Autonomous Surface Vessels (ASVs) to execute intervention tasks – e.g. equipment transfers, survey and inspection, or launch and recovery operations. Space-stabilisation technology as used in STL’s Neptune personnel access system has been further developed to permit synchronous-stabilisation between two moving platforms, such as an ASV and another vessel, a floating wind-turbine, a wave-energy converter, or other target subject to wave-induced motion.
A stabilised robotic arm also has applications on-board manned vessels. For example, the launch and recovery of underwater ROVs and AUVs is time and labour-intensive, as well as potentially hazardous to personnel and the equipment itself. A robotic arm will increase efficiency, safety, availability, and expand the weather window for operations.
‘How about using a robot arm?’ Photo Credit: NOAA Photo Photo Library (CC Licence)
STL Research have produced a video simulation of their Proteus Launch and Recovery system deployed on a fully autonomous uncrewed surface vessel. The video illustrates Proteus’ capabilities with respect to …
Meet STL Research at Ocean Tech Expo 2026 STL Research are delighted to be exhibiting at Ocean Tech Expo 2026, on 17th and 18th June at the University of Plymouth. …
STL Research’s entry in NCMA Brochure On the 10th to 12th March 2026, STL Research will be exhibiting at Oceanology International, as part of the National Centre for Marine Autonomy …